Mengenal Peralatan SOund Navigation And Ranging (SONAR) Dalam Mengendus Puing Pesawat Airasia QZ8501.

Pada hari keempat pencarian jenazah penumpang dan awak pesawat serta serpihan pesawat AirAsia QZ8501, tim gabungan yang dipimpin Badan SAR Nasional belum juga menemukan badan pesawat.
Titik terang sudah mulai terlihat. Salah satu perlengkapan sonar kabarnya sudah mendeteksi adanya badan pesawat di dasar laut. Informasi ini juga didapat tim pencari di KRI Banda Aceh, yang ikut melakukan pencarian di Selat Karimata. Berdasarkan laporan wartawan Kompas.com, Ihsanudin, dari KRI Banda Aceh, Rabu (31/12/2014), KRI Bung Tomo menerima kontak sonar yang diduga dari badan pesawat AirAsia sejak kemarin, Selasa (30/12/2014), sekitar pukul 20.00 WIB.
Artikel di bawah ini akan mengajak anda untuk sekedar tahu dan paham apakah peralatan sonar dan apa saja yang dapat dilakukan dengan peralatan sonar itu.

Sonar (Singkatan dari bahasa Inggris: SOund Navigation And Ranging), merupakan istilah Amerika yang pertama kali digunakan semasa Perang Dunia, yang berarti penjarakan dan navigasi suara, adalah sebuah teknik yang menggunakan penjalaran suara dalam air untuk navigasi atau mendeteksi kendaraan air lainnya. Sementara itu, Inggris punya sebutan lain untuk sonar, yakni ASDIC (Anti-Submarine Detection Investigation Committee).
Sonar adalah teknik yang menggunakan suara propagasi (biasanya di bawah air, seperti dalam navigasi kapal selam ) untuk menavigasi , berkomunikasi dengan atau mendeteksi objek di atau di bawah permukaan air, seperti kapal lainnya. Sonar Istilah ini juga digunakan untuk peralatan yang digunakan untuk menghasilkan dan menerima suara. Frekuensi akustik yang digunakan dalam sistem sonar bervariasi dari sangat rendah ( infrasonik ) ke sangat tinggi ( ultrasonik ). Studi tentang suara bawah air yang dikenal sebagai akustik bawah air atau hydroacoustics .
Sonar dapat digunakan sebagai sarana lokasi akustik dan pengukuran karakteristik gema "target" dalam air. Teknologi sonar di udara digunakan istilah radar. Sonar juga dapat digunakan di udara untuk navigasi robot, dan SODAR (yang melihat ke atas di udara sonar) digunakan untuk investigasi atmosfer.
Cara Kerja.

Sonar merupakan sistem yang menggunakan gelombang suara bawah air yang dipancarkan dan dipantulkan untuk mendeteksi dan menetapkan lokasi obyek di bawah laut atau untuk mengukur jarak bawah laut. Sejauh ini sonar telah luas digunakan untuk mendeteksi kapal selam dan ranjau, mendeteksi kedalaman, penangkapan ikan komersial, keselamatan penyelaman, dan komunikasi di laut.
Cara kerja perlengkapan sonar adalah dengan mengirim gelombang suara bawah permukaan dan kemudian menunggu untuk gelombang pantulan (echo). Data suara dipancar ulang ke operator melalui pengeras suara atau ditayangkan pada monitor.
Sejarah.
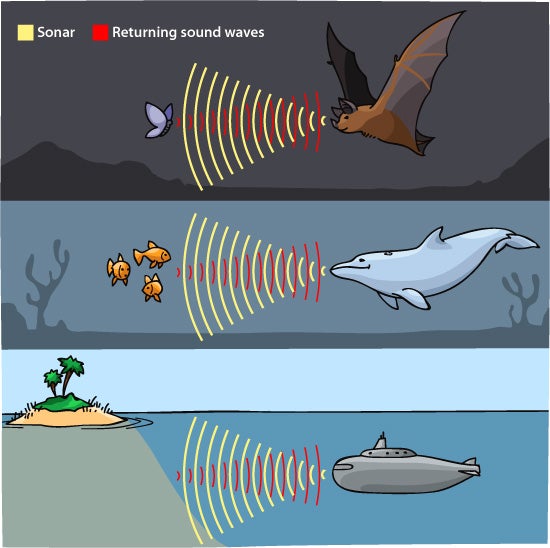
Beberapa binatang (lumba-lumba dan kelelawar) telah menggunakan suara untuk berkomunikasi dan deteksi obyek selama jutaan tahun, Penggunaan suara untuk 'echo mencari' makanan sama seperti kelelawar menggunakan suara untuk navigasi udara tampaknya mengilhami Leonardo da Vinci pada tahun 1490: sebuah tabung dimasukkan ke dalam air dikatakan digunakan untuk mendeteksi kapal dengan menempatkan telinga ke tabung.
Pada abad ke-19 bel bawah air digunakan sebagai tambahan untuk mercusuar untuk memberikan peringatan bahaya.
Munculnya "sonar" tak bisa dilepas dari rintisan tokoh seperti Daniel Colloden yang pada tahun 1822 menggunakan lonceng bawah air untuk menghitung kecepatan suara di bawah air di Danau Geneva, Swiss.
Lewis Nixon, pada tahun 1906 menemukan alat pendengar bertipe sonar pertama untuk mendeteksi puncak gunung es.
Penggunaan suara untuk 'echo mencari' obyek bawah air untuk navigasi telah diajukan oleh tim pencari kapal Titanic bencana 1912. Paten pertama di dunia untuk gema bawah air mulai perangkat diajukan di British Kantor Paten oleh ahli meteorologi Inggris Lewis Richardson bulan setelah tenggelamnya kapal Titanic, Fisikawan Jerman Alexander Behm memperoleh paten untuk echo sounder pada tahun 1913.
Insinyur Kanada Reginald Fessenden saat bekerja untuk Submarine Signal Company di Boston, membangun sistem eksperimental dimulai pada tahun 1912, Sistem kemudian diuji di Boston Harbor, dan akhirnya pada tahun 1914 dari US Revenue Cutter Miami (sekarang Coast Guard) di di Grand Bank off Newfoundland Canada. Dalam tes itu, Fessenden menunjukkan terdengar mendalam, komunikasi bawah laut ( Kode Morse ) dan gema mulai (mendeteksi gunung es di dua mil (3 km) Kisaran). Alat ini disebut Fessenden Osilator, bekerja pada frekuensi 500 Hz. Alat ini kemudian dipasang pada Kapal selam Montreal buatan Inggris kelas H diluncurkan pada tahun 1915 yang dilengkapi dengan osilator Fessenden.
Dalam perkembangan selanjutnya ada nama Paul Langevin yang tahun 1915 menemukan alat sonar pertama untuk mendeteksi kapal selam dengan menggunakan sifat-sifat piezoelektrik kuartz. Meski tak sempat terlibat lebih jauh dalam upaya perang, karya Langevin berpengaruh besar dalam desain sonar.
Pada tahun 1916, di bawah British Dewan Penemuan dan Penelitian , fisikawan Kanada Robert William Boyle mengambil proyek deteksi suara aktif dengan AB Wood , menghasilkan prototipe untuk pengujian pada pertengahan 1917. Karya ini, untuk Divisi Anti-Submarine dari British Naval Staf, dilakukan secara rahasia paling, dan menggunakan kristal piezoelektrik kuarsa untuk menghasilkan praktis aparat deteksi suara bawah air aktif pertama di dunia. Untuk menjaga kerahasiaan tidak menyebutkan eksperimen suara atau kuarsa dibuat - kata yang digunakan untuk menggambarkan karya awal ('SuperSonics') diubah menjadi 'ASD'ics, dan bahan kuarsa untuk' ASD'ivite: maka singkatan ASDIC Inggris.
Selama Perang Dunia I kebutuhan untuk mendeteksi kapal selam diminta lebih banyak penelitian ke dalam penggunaan suara. Inggris memanfaatkan awal perangkat mendengarkan bawah air yang disebut hydrophone, sementara fisikawan Perancis Paul Langevin, bekerja dengan imigran insinyur listrik Rusia Constantin Chilowsky, bekerja pada pengembangan perangkat suara aktif untuk mendeteksi kapal selam pada tahun 1915 menggunakan kuarsa.
Meskipun piezoelektrik transduser dan magnetostrictive kemudian menggantikan elektrostatik transduser yang mereka gunakan, karya ini dipengaruhi desain masa depan. Ringan suara-sensitif film plastik dan serat optik telah digunakan untuk hydrophone (transduser acousto-listrik dalam air digunakan), sementara Terfenol-D dan PMN (lead magnesium niobate) telah dikembangkan untuk proyektor.
Pada tahun 1918, baik Perancis dan Inggris telah membangun sistem aktif prototipe. Inggris diuji ASDIC mereka pada HMS Antrim pada tahun 1920, dan mulai produksi pada tahun 1922. The Destroyer 6 Flotilla memiliki kapal ASDIC dilengkapi pada tahun 1923. Sebuah sekolah anti-kapal selam, HMS Osprey , dan pelatihan armada dari empat kapal yang didirikan pada Portland di 1924. AS Sonar QB mengatur tiba pada tahun 1931.
Selama tahun 1930-an insinyur Amerika yang dikembangkan di bawah air teknologi mereka sendiri deteksi suara dan penemuan penting dibuat, seperti thermoclines, yang akan membantu pembangunan masa depan. Setelah informasi teknis yang dipertukarkan antara kedua negara selama Perang Dunia Kedua, Amerika mulai menggunakan yang SONAR istilah untuk sistem mereka, diciptakan sebagai setara RADAR .
Pada tahun 1939, dalam menanggapi pertanyaan dari Oxford English Dictionary , Angkatan mengarang cerita yang berdiri untuk 'Sekutu Submarine Komite Investigasi Deteksi', dan ini masih luas diyakini, meskipun tidak ada komite bantalan nama ini telah ditemukan dalam arsip Admiralty.
Dengan pecahnya Perang Dunia II , yang Royal Navy memiliki lima set untuk kelas kapal permukaan yang berbeda, dan lain-lain untuk kapal selam, dimasukkan ke dalam sistem serangan anti-kapal selam lengkap. Efektivitas ASDIC dini sembelih oleh penggunaan biaya kedalaman sebagai senjata anti-kapal selam. Ini diperlukan kapal menyerang untuk melewati kontak terendam sebelum menjatuhkan tuduhan atas buritan, yang mengakibatkan hilangnya kontak ASDIC di saat-saat menjelang serangan.

Display sonar ASDIC Unit tahun1944
Pada awal Perang Dunia II , teknologi ASDIC Inggris itu ditransfer secara gratis ke Amerika Serikat. Penelitian tentang suara ASDIC dan bawah air diperluas di Inggris dan di Amerika Serikat. Banyak jenis baru deteksi suara militer dikembangkan. Ini termasuk sonobuoys , pertama kali dikembangkan oleh Inggris pada tahun 1944 di bawah codename High Tea, mencelupkan / mencelupkan sonar dan deteksi tambang sonar. Karya ini membentuk dasar untuk pengembangan pasca perang yang berkaitan dengan melawan kapal selam nuklir .
Dalam perang, angkatan laut membuat ekstensif menggunakan kedua sonar pasif dan aktif dari kapal terbawa air, pesawat dan instalasi tetap. Meskipun sonar aktif digunakan oleh kapal perang permukaan dalam Perang Dunia II, pengguna kapal selam juga berpikir untuk menghindari deteksi sonar aktif karena potensi penggunaann sonar aktif akan mengungkapkan keberadaan dan posisi mereka untuk pasukan musuh.

Namun, munculnya -pengolahan sinyal modern memungkinkan penggunaan sonar pasif sebagai primer berarti untuk pencarian dan deteksi operasi. Pada tahun 1987 sebuah divisi dari Jepang perusahaan Toshiba dikabarkan menjual mesin ke Uni Soviet yang memungkinkan baling-baling kapal selam mereka akan digiling sehingga mereka menjadi radikal lebih tenang, membuat generasi baru kapal selam lebih sulit untuk dideteksi.
Jenis Sonar
Ada dua jenis sonar:
- sonar aktif
Sonar aktif berperan memancarkan pulsa suara dan mendengarkan gema. Alat sonar kedua digolongkan sebagai sonar aktif, di mana ada sinyal yang di mana sinyal sonar aktif dikirim dan diterima kembali. Misalnya saja untuk mengetahui jarak satu obyek, petugas sonar mengukur waktu yang diperlukan oleh sinyal sejak dipancarkan hingga diterima kembali.
Sonar aktif menggunakan pemancar suara dan penerima. Ketika keduanya di tempat yang sama itu adalah operasi monostatic. Ketika pemancar dan penerima dipisahkan itu adalah operasi bistatic. Ketika pemancar lebih (atau lebih penerima) yang digunakan, lagi spasial terpisah, itu adalah operasi multistatic. Kebanyakan sonar digunakan monostatically dengan array yang sama sering digunakan untuk pengiriman dan penerimaan.

Sonar aktif menciptakan pulsa suara, sering disebut "ping", dan kemudian mendengarkan refleksi ( gema ) dari pulsa. Ini pulsa suara umumnya dibuat secara elektronik dengan menggunakan proyektor sonar terdiri dari generator sinyal, power amplifier dan elektro-akustik transduser / array. Sebuah beamformer biasanya digunakan untuk berkonsentrasi kekuatan akustik menjadi sinar, yang dapat menyapu untuk menutupi sudut pencarian yang diperlukan. Umumnya, transduser elektro-akustik dari Tonpilz jenis dan desain mereka dapat dioptimalkan untuk mencapai efisiensi maksimum atas bandwidth terluas, untuk mengoptimalkan kinerja sistem secara keseluruhan. Kadang-kadang, pulsa akustik dapat dibuat dengan cara lain, misalnya (1) kimia menggunakan bahan peledak, atau (2) senapan angin atau (3) sumber suara plasma.
Untuk mengukur jarak ke obyek, waktu dari transmisi pulsa untuk penerimaan diukur dan diubah menjadi kisaran dengan mengetahui kecepatan suara. Untuk mengukur bantalan, beberapa hydrophone digunakan, dan set mengukur waktu kedatangan relatif terhadap masing-masing, atau dengan array hydrophone, dengan mengukur amplitudo relatif balok terbentuk melalui proses yang disebut beamforming .
Penggunaan array mengurangi respon spasial sehingga memberikan penutup lebar multibeam sistem yang digunakan. Sinyal Target (jika ada) bersama-sama dengan kebisingan kemudian dilewatkan melalui berbagai bentuk pemrosesan sinyal , yang untuk sonars sederhana mungkin hanya pengukuran energi. Hal ini kemudian disampaikan kepada beberapa bentuk perangkat keputusan yang memanggil output baik sinyal atau noise yang diperlukan. Perangkat Keputusan ini mungkin merupakan operator dengan headphone atau layar, atau dalam sonars lebih canggih fungsi ini dapat dilakukan oleh perangkat lunak. Proses selanjutnya dapat dilakukan untuk mengklasifikasikan target dan melokalisasi itu, serta mengukur kecepatannya.

Sonar pencari ikan
Satu sonar berguna kecil mirip dalam tampilannya senter tahan air. Kepala menunjuk ke dalam air, tombol ditekan, dan perangkat akan menampilkan jarak ke target. Varian lain adalah " fishfinder "yang menunjukkan layar kecil dengan kawanan ikan. Beberapa sonars sipil (yang tidak dirancang untuk siluman) mendekati sonars militer aktif dalam kemampuan, dengan menampilkan tiga dimensi cukup eksotis dari daerah dekat perahu.
Sonar aktif juga digunakan untuk mengukur jarak melalui air antara dua transduser sonar atau kombinasi dari hidropon (mikrofon akustik bawah air) dan proyektor (speaker akustik bawah air). Sebuah transduser adalah sebuah alat yang dapat mengirim dan menerima sinyal akustik ("ping"). Ketika hydrophone / transducer menerima sinyal interogasi tertentu akan meresponnya dengan mengirimkan sinyal balasan tertentu. Untuk mengukur jarak, satu transduser / proyektor mentransmisikan sinyal interogasi dan mengukur waktu antara transmisi dan penerimaan lain transduser / hidrofon balasan. Perbedaan waktu, skala oleh kecepatan suara melalui air dan dibagi dua, adalah jarak antara dua platform. Teknik ini, bila digunakan dengan beberapa transduser / hydrophone / proyektor, dapat menghitung posisi relatif benda statis dan bergerak di dalam air.

Dalam situasi pertempuran, pulsa aktif dapat dideteksi oleh lawan dan akan mengungkapkan posisi kapal selam.
Sebuah jenis yang sangat terarah, tetapi rendah efisiensi, sonar (digunakan oleh perikanan, militer, dan untuk keamanan port) memanfaatkan fitur nonlinear kompleks air yang dikenal sebagai sonar non-linear, transduser virtual yang dikenal sebagai array yang parametrik .
- sonar pasif
Sonar pasif adalah sonar yang tidak memancarkan sinyal yang dikirim keluar. sehingga ia "hanya berperan sebagai pendengar" suara yang dibuat oleh kapal, Pada sistem pasif maju, ada bank data sonik (sumber bunyi) yang besar. Sistem komputer menggunakan bank data tadi untuk mengenali kelas kapal, juga aksinya (kecepatan atau senjata yang ditembakkan).
Sonar pasif mendengarkan tanpa transmisi. Hal ini sering digunakan dalam pengaturan militer, meskipun juga digunakan dalam aplikasi ilmu pengetahuan, misalnya, mendeteksi ikan untuk studi / tidaknya di berbagai lingkungan perairan - lihat juga akustik pasif dan radar pasif . Dalam penggunaan yang sangat luas, istilah ini dapat mencakup hampir semua teknik analisis yang melibatkan suara yang dihasilkan dari jarak jauh, meskipun biasanya terbatas pada teknik yang diterapkan dalam lingkungan air.
Tidak seperti sonar aktif, hanya ada satu cara perbanyakan yang terlibat. Karena pemrosesan sinyal yang berbeda yang digunakan, sinyal terdeteksi minimum untuk rasio kebisingan akan berbeda. Persamaan untuk menentukan kinerja sonar pasif adalah:
SL - TL = NL - DI + DT
di mana SL adalah tingkat sumber, TL adalah hilangnya transmisi, NL adalah tingkat kebisingan, DI adalah indeks directivity dari array (perkiraan untuk keuntungan array) dan DT adalah ambang deteksi. Rumus dari sonar pasif adalah:
FOM = SL + DI - (NL + DT).
Aplikasi Pengunaan Sonar.

Kapal perang La Motte-Picquet jenis F70 dilengkapi dengan VDS (Variable Depth Sonar) jenis DUBV43 atau DUBV43C, jenis sonar yang ditarik.

AN / AQS-13 sonar Dipping dikerahkan dari H-3 Sea King .

Tampilan kabin sonar pencari ikan

AN-PQS 2A hand held sonar, sonar portabel yang canggih milik Amerika Serikat.
Penyusun : Yohanes Gitoyo, S Pd,
Sumber :
- http://en.wikipedia.org/wiki/Sonar
- http://nasional.kompas.com/read/2014/12/31/19432491/Perlengkapan.Sonar.KRI.Bung.Tomo.Sudah.Deteksi.Lokasi.Badan.Pesawat.di.Dasar.Laut










Komentar
Posting Komentar